Calibrate stereo depth to ensure stable obstacle avoidance and navigation behavior. MARS uses stereo depth for navigation and obstacle avoidance. Because cameras vary slightly across units, each robot must be calibrated.Documentation Index
Fetch the complete documentation index at: https://docs.innate.bot/llms.txt
Use this file to discover all available pages before exploring further.
- After first setup
- After major OS updates that include depth changes
- Any time depth readings appear unstable
1) Prepare the calibration board
Download and print: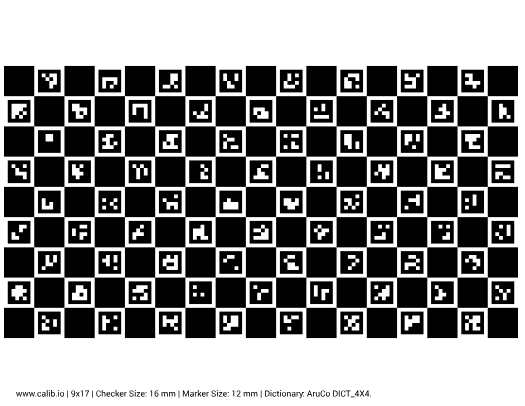
- Print at 100% scale (no fit-to-page scaling)
- Mount it flat on a letter-sized cardboard backing
- Do not cover checker squares or markers
- Flatness matters more than perfect edge trimming
2) Start calibration from the app
Go to Configuration -> Depth and tap Start calibration
Use the Configuration tab, open Depth, then start calibration.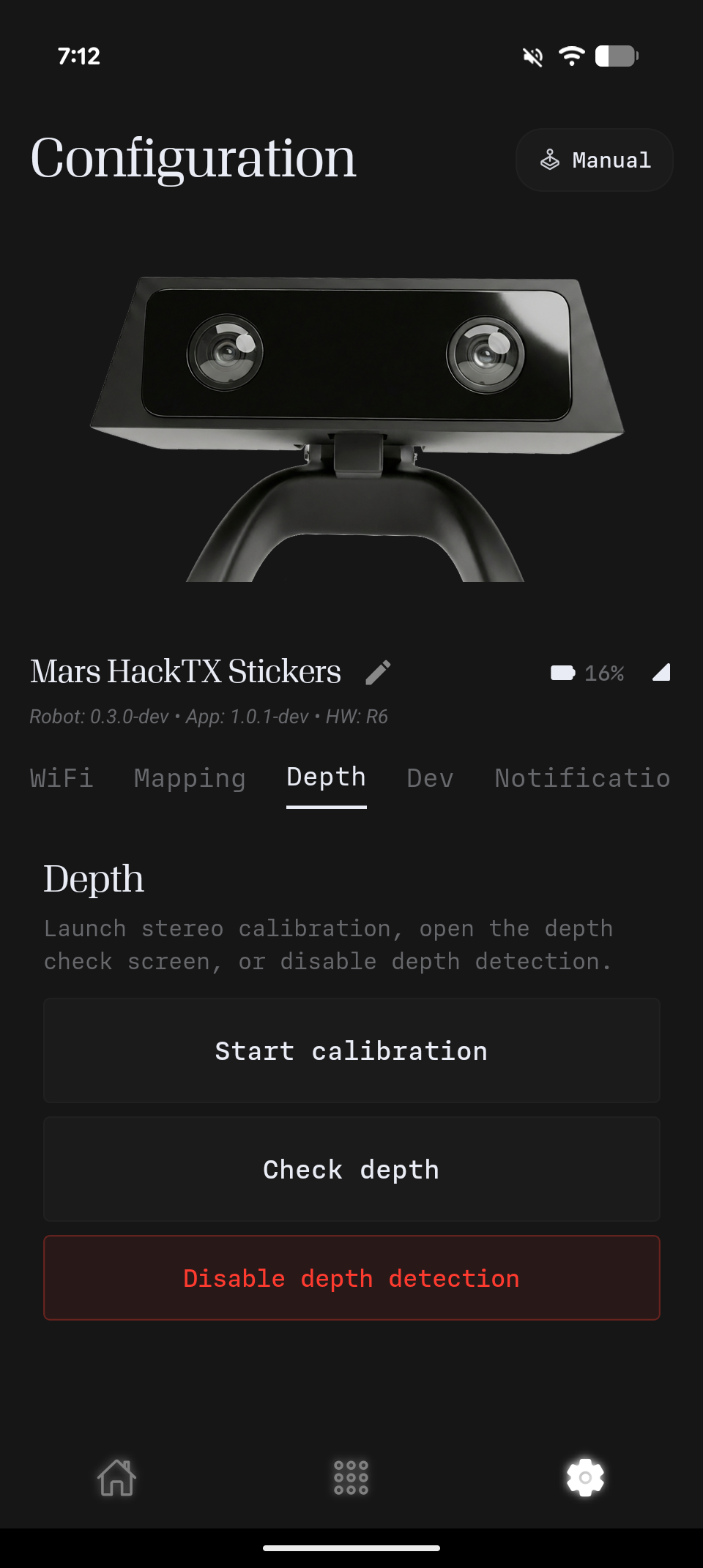
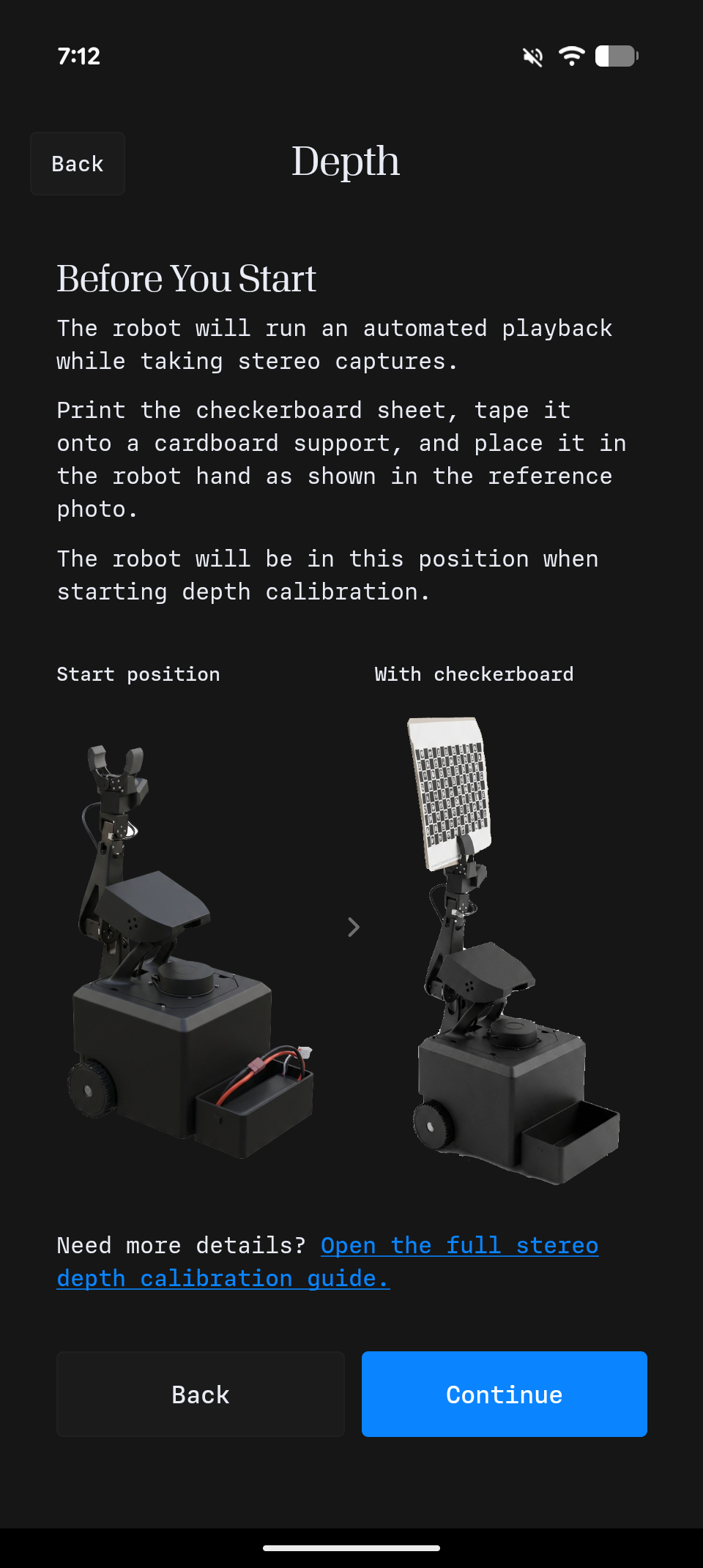
3) Let calibration complete
- Stay clear while MARS runs the sequence
- Wait for completion status in the app
- If it fails, repeat with better board flatness and stability