Core concepts
An agentic OS
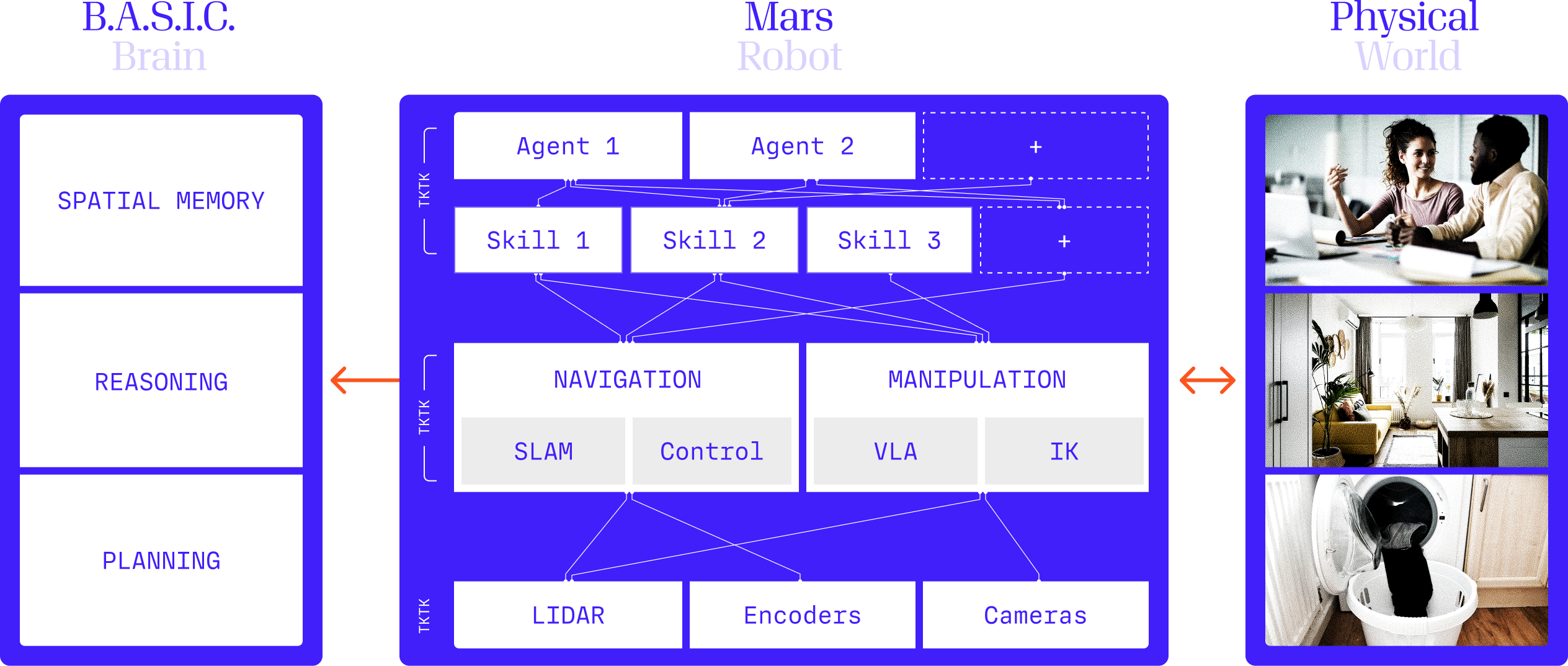
Innate robots run an agentic OS built on top of ROS2. It is powered by the Innate agent — our cloud-hosted AI that watches what the robot sees, reasons about what to do, and triggers skills to do it (more on it below). You write agents and skills in plain Python; the OS handles the classic robotics stack underneath (unless you want to go down there — see ROS2 Core).Agents
The central concept of the Innate OS is theagent, which is our name for a physical app for robots. An agent is defined by a system prompt and a set of skills it can use.
A complete agent fits in one short Python file: subclass Agent, give it an id and a display name, list its skills, and write its prompt. Drop the file on the robot and it loads automatically — no registration step.
Anatomy of an Agent
The full structure, a complete working example, and a copy-paste template.