A8 and H8 with recalibrate_manual, then computes A1 and H1 automatically and saves all corners to ~/board_calibration.json.
Calibration process
Enable manual arm movement
Set the arm to manual/limp mode so you can position the end effector by hand.
Position for A8 and record
Move the end effector to the center of 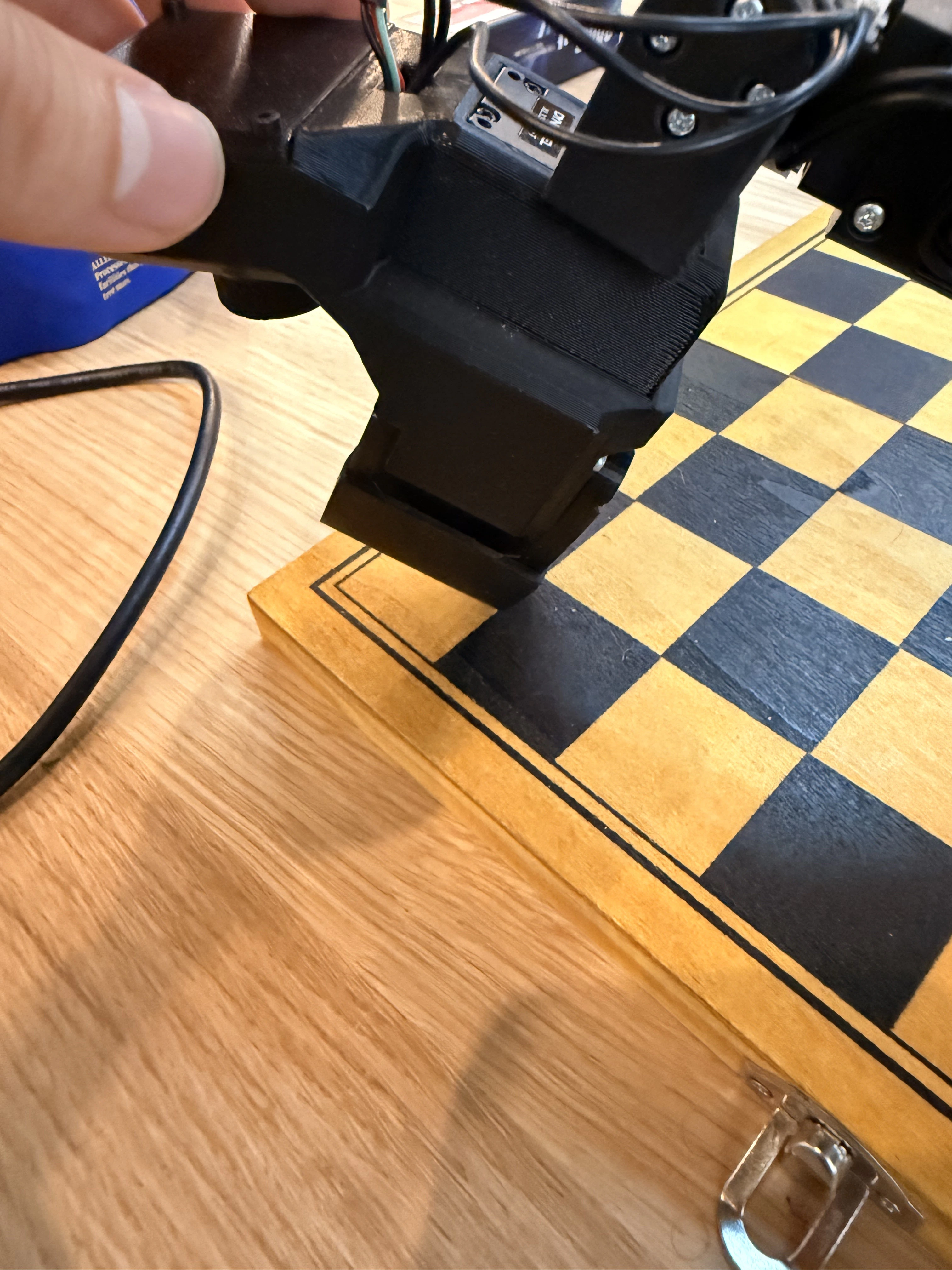
A8 and record that top corner reference.Position for H8 and record
Move the end effector to the center of
H8 and record that second top-corner reference.1) Manual triggering
Trigger the skills from the app or CLI.App
- Open Innate Controller App -> Skills
- Run:
arm_utilswithcommand=torque_offrecalibrate_manualwithcorner=A8recalibrate_manualwithcorner=H8arm_utilswithcommand=torque_on
CLI (via ROS2 actions)
2) Agentic triggering
Runchess_agent. It can guide you through calibration and trigger the same skill sequence with you (torque_off -> A8 -> H8 -> torque_on) before play.
If calibration quality drifts during use, rerun the same sequence manually.