- After your first setup.
- After major OS updates that include depth changes.
- Any time depth readings look wrong or unstable.
1) Prepare the calibration board
Download and print the official board: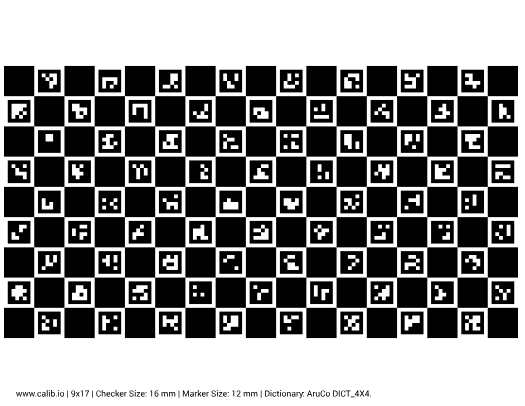
- Print at 100% scale (no “fit to page” scaling).
- Cut a letter-sized piece of cardboard.
- Stick the printed board flat on the cardboard.
- Do not cover any checker squares or markers.
- The outside edges do not need to be perfect; the board being flat is what matters.
2) Start calibration from the app
Go to Configuration -> Depth and tap Start calibration
Use the Configuration tab, open Depth, then start calibration.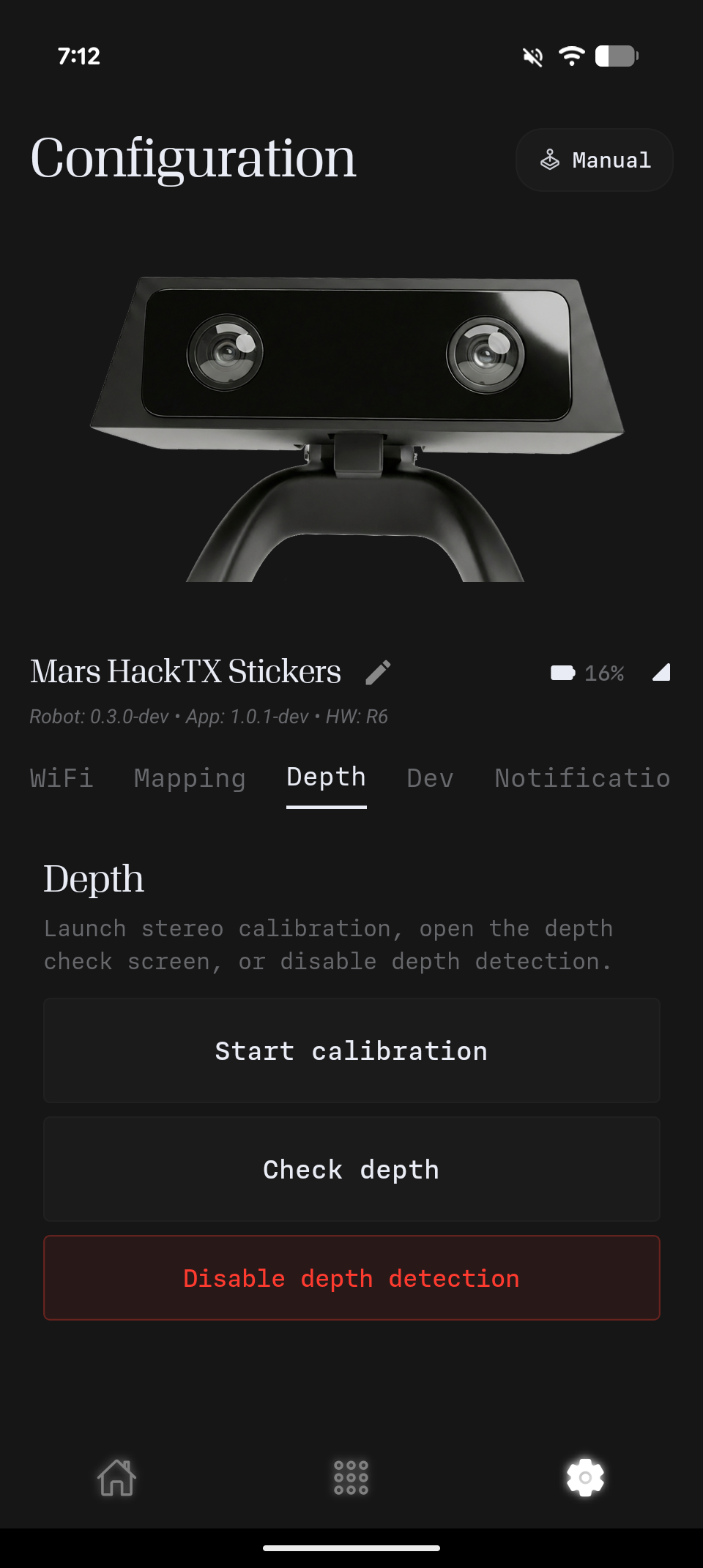
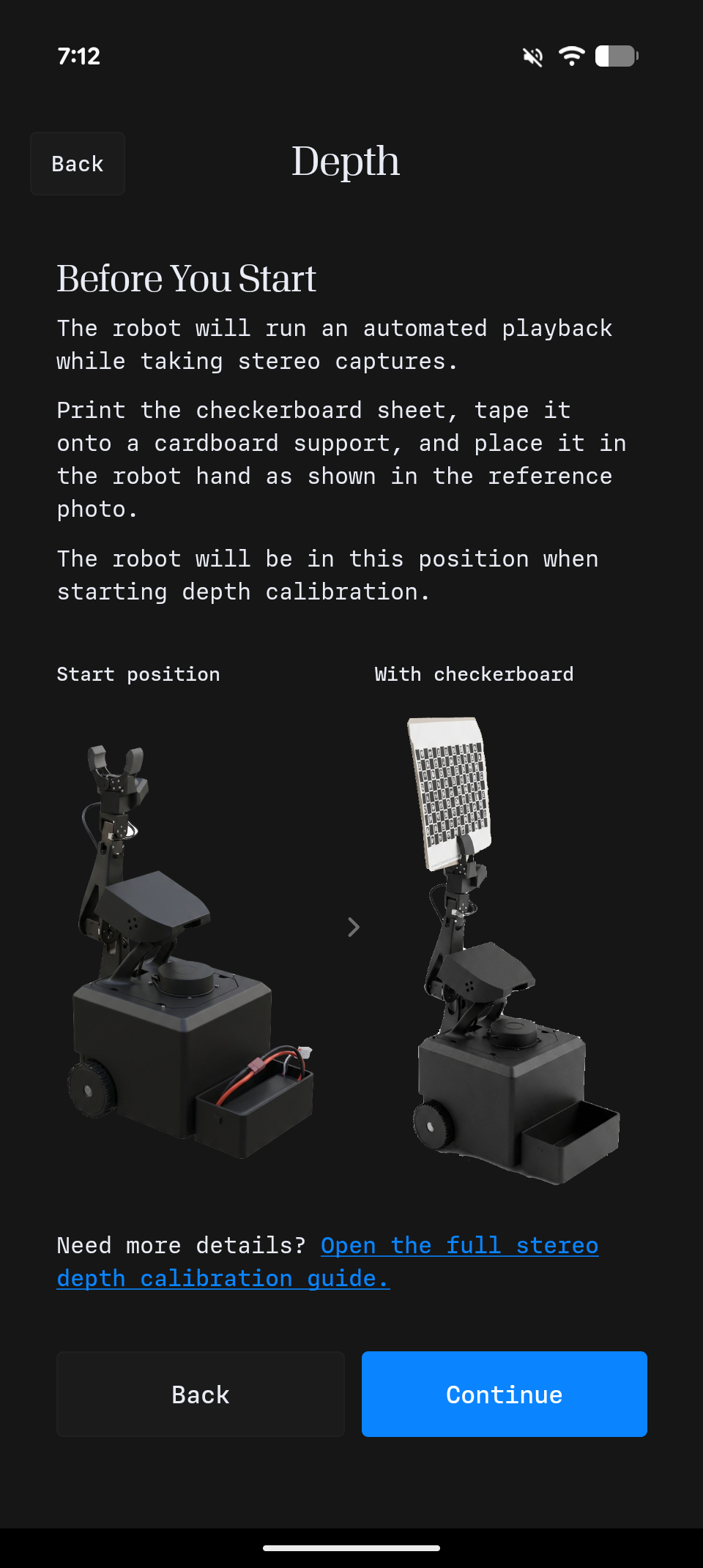
3) Let calibration finish
- Keep clear while MARS runs the calibration sequence.
- Wait for the app to report completion.
- If calibration fails, repeat the process with better board flatness and stability.